
 La utilización de la lógica dinámica en seguridad presenta muchas ventajas de diseño, instalación, mantenimiento (y por tanto costes) de los sistemas de seguridad en máquinas.
La utilización de la lógica dinámica en seguridad presenta muchas ventajas de diseño, instalación, mantenimiento (y por tanto costes) de los sistemas de seguridad en máquinas.
Este ejemplo de aplicación en una célula robotizada permite apreciar no solo que las soluciones con lógica dinámica son sencillas y baratas, sino fáciles de mantener – y por ello aún más interesantes.
Presentación
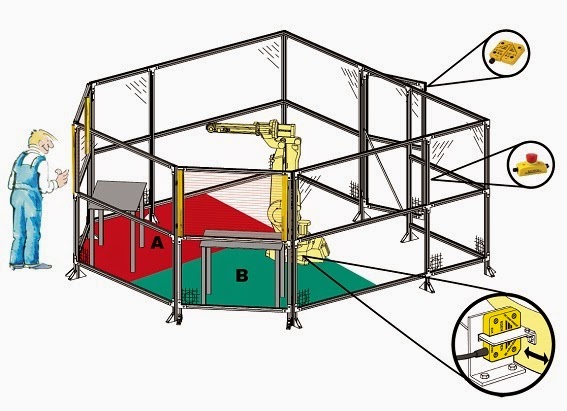
Una célula procesa piezas mediante un robot que las coge de forma continua desde una bandeja de carga A, y las entrega en una bandeja de descarga B.
La célula presenta una ventana de acceso de bandejas de entrada y otra de salida, así como una puerta de acceso para ajustes y mantenimiento de la célula.
Un requisito básico de la célula es que la producción no se detenga durante la carga y la descarga de piezas.
La seguridad
El sistema de seguridad debe ser tal que detecte la presencia en cualquiera de las zonas de carga/descarga e impida al robot acceder a la zona en la que se ha detectado la presencia del operario.
La solución más simple
En la solución de la figura, cada ventana de carga/descarga incorpora una cortina fotoeléctrica de seguridad (convencional pero con adaptador dinámico) para detectar el acceso del operario.
La posición del robot en la zona de carga A o de Descarga B se detecta mediante un detector dinámico para cada zona, mediante unas levas metálicas que atraviesan sendos detectores dinámicos.
La puerta incluye un detector dinámico igual que los del robot. Para finalizar se han añadido tres pulsadores de emergencia, también dinámicos.
El sistema de seguridad queda muy simplificado gracias a la utilización de componentes de seguridad dinámicos, ya que consiste en una serie de dispositivos de seguridad conectados al relé de seguridad dinámico: emergencias, puerta y cortinas. Todo ello con un Nivel de Prestaciones Pl=e.

Mientras el robot esté en la zona A, el operario estará protegido por la cortina A, pero podrá acceder a través de la cortina B, que se encontrará en muting por el detector dinámico B del robot.
La señal dinámica generada por el relé utiliza un solo canal, que se desdobla en cada cortina fotoeléctrica de forma que la señal dinámica pueda pasar por el detector dinámico del robot mientras se obstruya la cortina fotoeléctrica de la misma zona, realizando la función de muting sin necesidad de incluir relés de seguridad de cortinas. Incluso en el caso de precisar un rearme manual de las cortinas fotoeléctricas, se puede conectar el pulsador de rearme directamente a cada cortina, sin complicar por ello el sistema.
Este diseño es cuatro veces más sencillo que uno convencional. Las ventajas en términos de costes también son espectaculares.
Si tiene un sistema de seguridad a diseñar, consúltenos, y podremos implementar las ventajas de la lógica dinámica en su aplicación.
Para más información: Seguridad dinámica